Inference using TensorRT Backend.
0x01 Tensorflow 2.0
1.1. Convert
keras hdf5 –> .pb
1 | # V2 behaviour is disabled by default in Jetpack 4.4.DP. |
keras hdf5 –> .pb
1 | # V2 behaviour is disabled by default in Jetpack 4.4.DP. |
自然交互:更接近与人之间的交互方式。 PC:键盘鼠标;移动:触控;现在:语音、手势、图像。云端一体:场景智能:主动感知、用户理解、个性化推荐、智能决策。5G加速智联网时代的到来,多模态数据成为主流
电阻屏=>电容屏:流量从PC时代走向移动时代
多模态自然交互:移动时代走向智联网时代

1976 发现麦格克效应2015 200 citation–>3000+ citation. 有代表的论文 VQA: Visual Question Answering (ICCV 2015)2016 多个大型多模态数据集发表 (Youtube8m, audioset)2017 VoxCeleb 发布(多模态自然人识别数据集)2018 视觉语音降噪,虚拟人合成技术 |
 |
 |
 |
|---|---|---|---|
| input image | piece-wise planar segmentation | reconstructed depthmap | texture-mapped 3D model |
Velodyne 通过网线发送的原始数据包为球坐标(spherical coordinates, r, ω, α)。它的 ros driver 提供了两种更方便的格式:/velodyne_points和/velodyne_scan
其中,/velodyne_points是转换为XYZ后的坐标,转换的方式如下图;/velodyne_scan为第8根线的scan值(可直接用来模拟单线雷达)。
目前我成功的有两种方法:
autoware_camera_lidar_calibrator : 不需要自制标定板,需要手动人工点击9个点velo2cam_calibration : 全自动,需要定制一个标定板又到写年终总结的时间了
毕业工作了
对文本进行OCR前,必须分析和定义文档的逻辑结构。 例如文本块、段落、行的位置;是否有应该重建的表格;是否有“图像”“条形码等”。
文档布局分析 (Document Layout Analysis) 是识别和分类文本文档的扫描图像中的感兴趣区域(RoI, Regions of Interest) 的过程。阅读系统需要从非文本区域分割文本区域,并按正确的阅读顺序排列。将文本正文,插图,数学符号和嵌入文档中的表格等不同区域(或块)的检测和标记称为几何布局分析。但文本区域在文档中扮演不同的逻辑角色(标题,标题,脚注等),这种语义标记是逻辑布局分析的范围。
文档布局分析是几何和逻辑标签的结合。它通常在将文档图像发送到OCR引擎之前执行,但也可用于检测大型存档中同一文档的重复副本,或者通过其结构或图示内容索引文档。

网上的解决方案大多是
删除已经安装的arm64包,然后执行dpkg --remove-architecture arm64,但是错误在下次刷机后依然会出现
几个月前在计算所用rplidar做过一个送咖啡机器人。可是运用到室外场景Lidar成本太高,于是转战视觉SLAM。
花了几天时间用gazebo仿真,跑通了ORB SLAM2框架。

执行 nvidia-smi 显示: NVIDIA-SMI has failed because it couldn’t communicate with the NVIDIA driver. Make sure that the latest NVIDIA driver is installed and running.
这三个算法是好几年前就好奇但一直没搞懂的神奇算法
2017年应该是最折腾的一年,为了传说中的梦想从深圳到了北京,离开了我超喜欢的一个领导,到计算所后由期待到失望…
时间过的很快,因为把时间都浪费在搬家和融入新团队中了。不过忙忙碌碌的好处就是没有时间发呆和难过了哈哈哈 >_<

不过我喝咖啡从来不是为了提神的 这个世界上唯一提神的东西就是你今天必须完成的事情呀
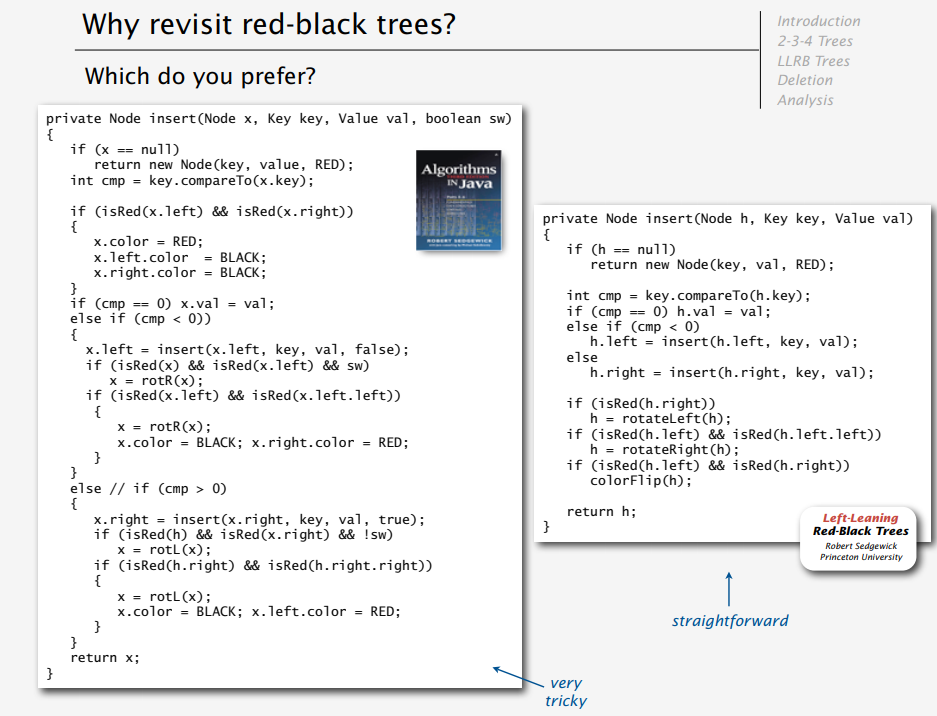
博士只考一门数据结构与算法分析,如果这都考不过那就真的重在参与了。本文把看完书以后手撸的代码贴出来,留个纪念。
Tensorflow 的使用者虽多,但真的很难用。幸亏有基于TF和Theano的高层框架Keras(不幸的是Theano已经停止更新了)。我们通过MNIST来熟悉一下Keras。
先推荐一个学习线性代数的教程http://www.bilibili.com/video/av6731067/,不管你多忙也请看上面这个视频。
3Blue1Brown制作,深入浅出、直观明了地分享数学之美。
调了一下午参数调到怀疑人生,最后发现是参数配置文件没有同步 - -
晚上遗留的一大堆Bug,第二天都自动消失了
肯定是有会写代码的海螺姑娘偷偷入侵了我的电脑 >_<

去年10月份左右从咸鱼买了一把号称93年产原装无修改的Fender vintage 57 stratocaster,拆开看了一下,琴颈的生产日期是1993.05.21,还挺有纪念意义的。但就在我买了新拾音器准备改装它的时候,好像发现了一个天大的秘密。
")
来北京一个月,一直蜗居在一个小屋里,没有钱花+前途迷茫的感觉真是浑身难受。
我现在的任务是接手之前几个客座生的项目,用Turtlebot做一个送咖啡机器人。第一周的时间用来搭建一个完整的demo

本资源来自网络,侵权请按ALT+F4
在人脸检测方面常用的用两个,一个是 Tinyface 能检测到比较小的人脸。可以先玩通demo
另外一篇更为常用,如果你们对固定场景,比如视频对话,检测效果不错。而且他们能标注人脸关键点。
文章:Joint Face Detection and Alignment using Multi-task Cascaded Convolutional Networksb((Code)) 很多最近的创业公司用这个,但是如果场景特殊需要 re-train 一下
因为这个已经不是学术前沿问题,所以 CVPR、ICCV 上没有文章研究这一块
人脸跟踪这一块 openCV 有一个比较好的教程 http://opencv-java-tutorials.readthedocs.io/en/latest/06-face-detection-and-tracking.html
但是,工程上通用的做法还是,逐帧用最好的 face detector(比如 tiny face)检测后,用 optical flow 串起来。因为现在 face detection 已经很快了,没必要用 tracking 来加速,能做到很快。具体怎么弄我们可以当面讨论。
我的学生找了一下开源库(仅作参考,不建议用),但是不是正规的文章 https://github.com/kylemcdonald/ofxFaceTracker
首先庆祝一下我用TX-1做实验写的《GPU加速与L-ORB特征提取的全景视频实时拼接》发表啦^_^
导师表示很开心,又给我买了两台TX-2
TX-2比TX-1除了性能的升级,其它部分没有太大变化,接下来要写的小技巧对于TX-1/2都适用。使用期间发现的问题都会持续更新到这篇博客,目前发现的问题有:
不要代码写多了就变得那么没有人情味了
执行mnist = input_data.read_data_sets("MNIST_data/", one_hot=True)后,会检查MNIST_data/文件夹下有没有数据库文件,如果没有会自动下载。这一步如果执行比较慢,可以用迅雷手动下载下面四个文件,保存到MNIST_data目录(不需要解压)
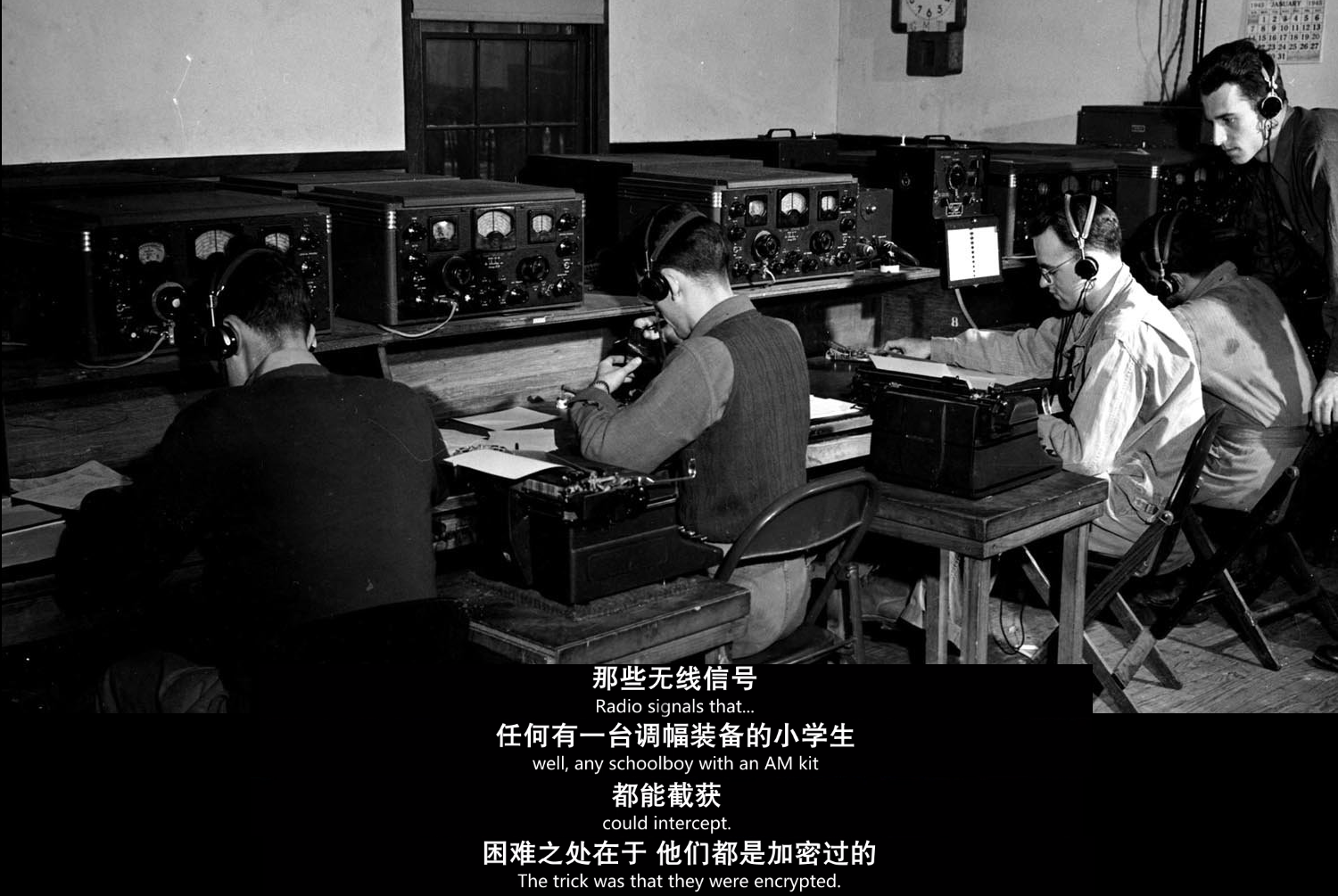
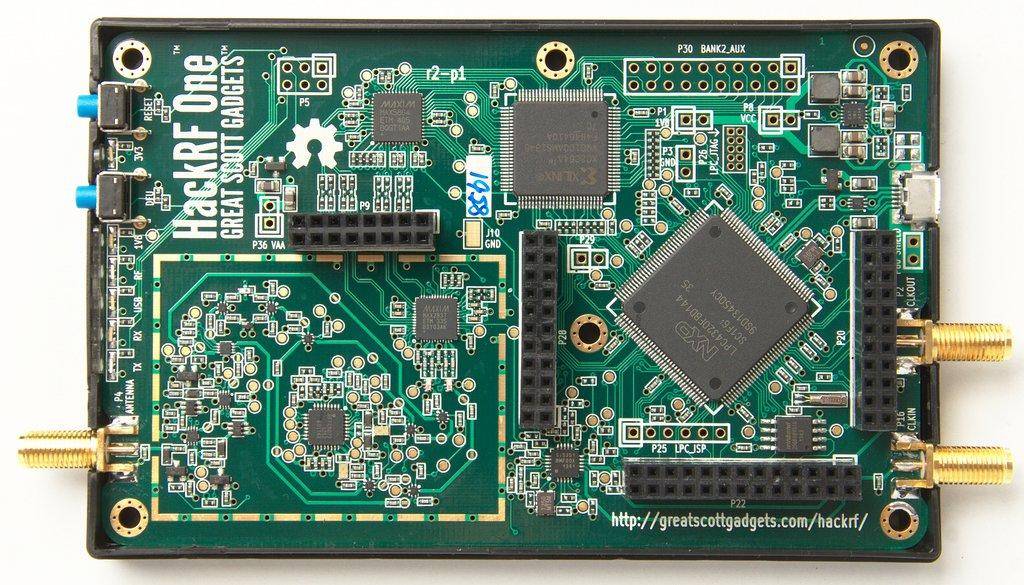
上一节已经对HackRF升级了最新的固件,今天我们利用它做一些简单的实验。因为本人也是小白,所以本文并没有任何复杂的理论知识,只要会用Linux按照顺序一步一步操作都可以实验成功。
HackRF已经吃灰一年多了,官方的上一个版本还是2015.07,最新的2017.02.1版增加了Sweep mode,Hardware synchronization,hackrf_debug,降低了功耗以及修复了Bug. 在mossmann/hackrf/releases有编译好的固件hackrf-2017.02.1.tar.xz下载
公司发的圣诞礼物被一个自以为是的胖女人拿走了,不开心
众所周知GPGPU的性能瓶颈为PCI-E传输速度,数据传输时会导致运算资源闲置。因此NVIDIA发明了一个很牛逼的技术Zero Copy,它把主机内存直接映射到GPU内存上,在GPU需要数据时直接从主机内存寻找,隐式的传输到GPU中。还有另一个技术叫Pinned Memory,会在产生一个不会被分页的内存,这块内存不会被交换到磁盘的虚拟内存上,内存地址也不会被重新定位,因此,相比普通的Pageable Memory有更高的速度。使用Pinned Memory是一定会提高性能的,不过也需要适当使用,否则太多Pinned Memory会把Host Memory给挤爆了(因为它不会分页到虚拟内存去)。
光流是空间运动物体在观察成像平面上的像素运动的瞬时速度,是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。
最近忙着写论文,没有时间写博客了。(说得就像会有人看一样)
现在的学术水平已经基本脱离“科学靠脑补、大力出奇迹”的民科状态了

2016-09-27 07:49 Fixed in Version 2016.3
秉承着以解决问题为乐趣,没有问题创造问题也要解决问题为基本准则。今天发现了一个gnome-theme-kal主题在xfce4下的Bug
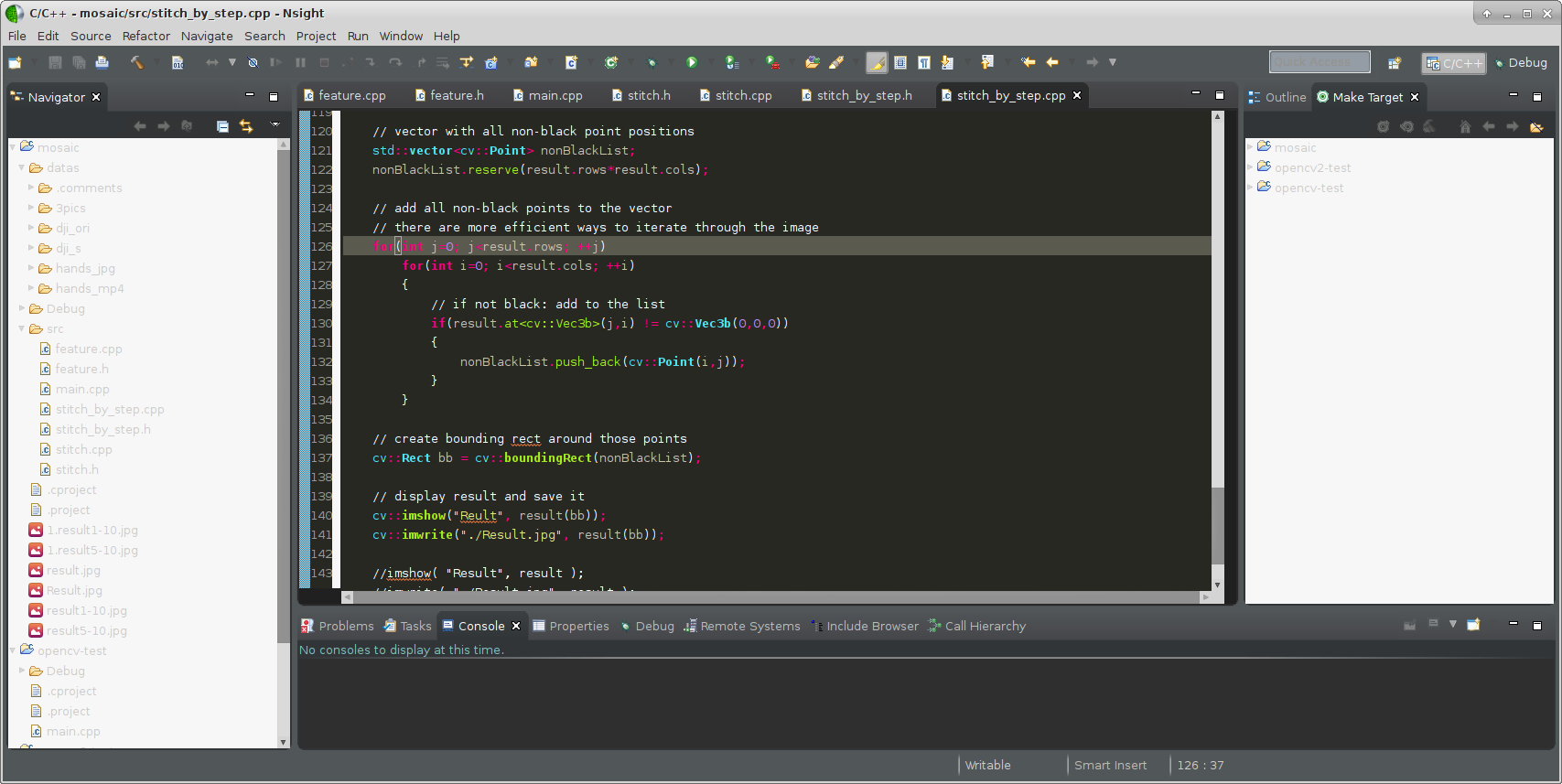
最近用Nvidia提供的Nsight来写OpenCV/CUDA,白色主题实在是太丑了,就采用通用的方法换成了黑色主题。结果不管怎么折腾,旁边的Navigator都还是白色的,使得整个界面不白不黑的,简直比VIM还丑。